





Universal Aerial Navigation Co. - Gorgeous - 1910 dated Aviation Stock Certificate - Gyroplane Vignette
Inv# VS1098 Stock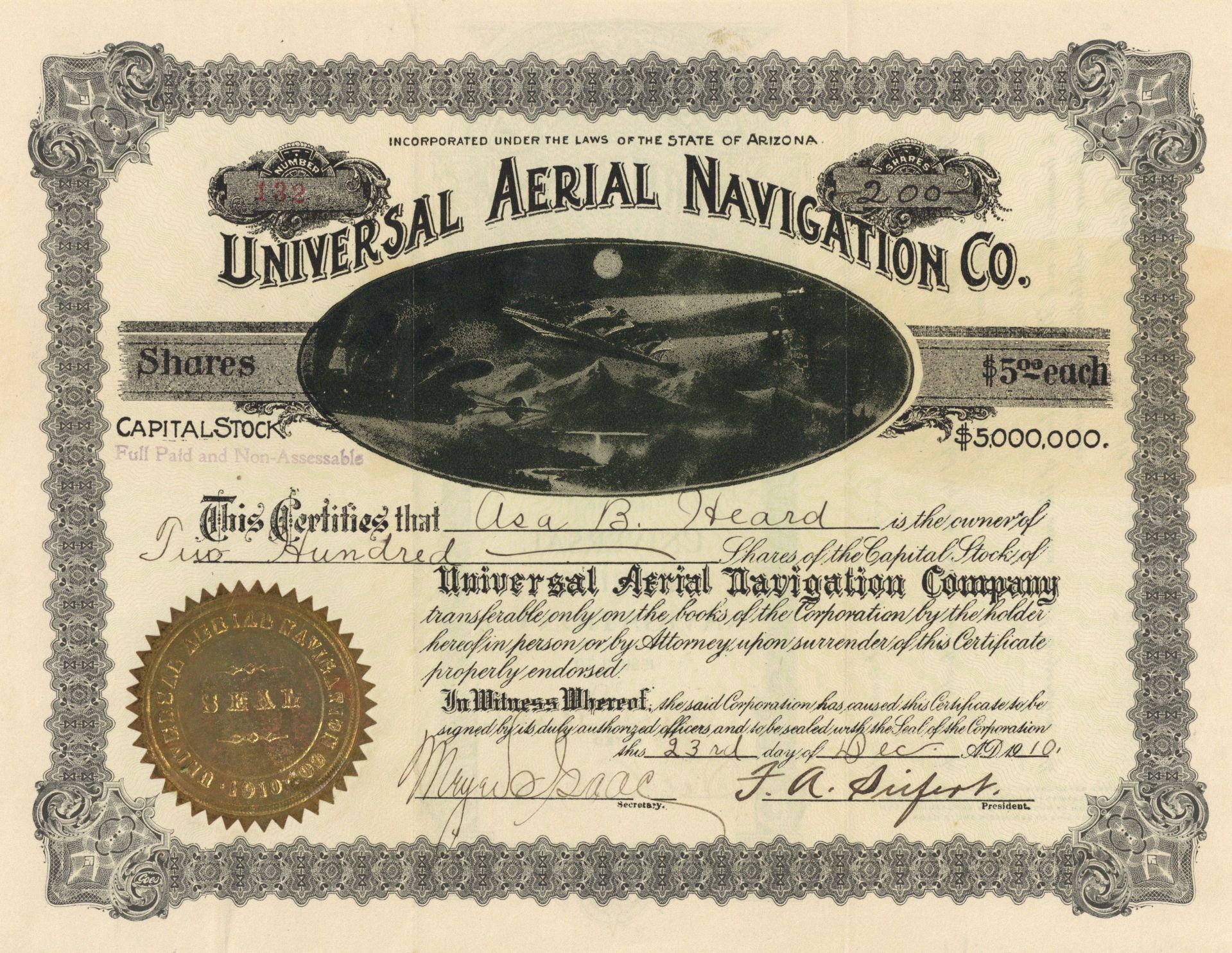
Stock. Very unique artwork as vignette. Gyroplane in vignette. Might relate to the Transcontinental Aerial Navigation Co.
A share certificate featuring a captivating vignette of the "Gyroplane," an all-metal aircraft developed by J. W. Owen. Owen was convinced that a successful aircraft should be able to take off without a running start, leading him to merge the principles of a helicopter with those of a conventional monoplane in his innovative design. The aircraft was constructed from steel and aluminum, effectively mitigating the risk of combustion. A prototype was displayed at the St. Louis University Campus in 1912. The company was established in 1910 in Arizona with the aim of manufacturing a commercial passenger airship capable of accommodating up to 100 passengers and achieving speeds of up to 100 miles per hour. This airship was designed to take off from both land and water, with the ability to ascend vertically or be launched like an airplane, thus earning the designation of a gyroplane.
The structure would be constructed from aluminum and macadamite, featuring two engines that power four propellers, each with a diameter of 12 feet. It could be manufactured in various sizes, ranging from a small two-person runabout to a large vehicle capable of accommodating 50 to 100 passengers. Unsurprisingly, the project did not come to fruition. This raises a significant question regarding the legitimacy of the company: was it a genuine enterprise or merely a scheme to deceive investors? An autogyro, derived from the Greek term meaning "self-turning," is also referred to as a gyroplane or gyrocopter. This rotorcraft utilizes an unpowered rotor that rotates freely to generate lift. The necessary forward thrust is supplied by a propeller driven by an engine. Although the rotor resembles that of a helicopter, it is essential for the autogyro's rotor to have air flowing across its disc to facilitate rotation, with the airflow moving upwards through the rotor disc instead of downwards.
A stock certificate is issued by businesses, usually companies. A stock is part of the permanent finance of a business. Normally, they are never repaid, and the investor can recover his/her money only by selling to another investor. Most stocks, or also called shares, earn dividends, at the business's discretion, depending on how well it has traded. A stockholder or shareholder is a part-owner of the business that issued the stock certificates.


Ebay ID: labarre_galleries